自動運転トラックはトレーラー型へ
~長大車両の導入と共同輸送で採算性の向上を目指す~
ダイナミックマッププラットフォーム、BIPROGY、NEXT Logistics Japan、ヤマト運輸の4社は、国立研究開発法人新エネルギー・産業技術総合開発機構(NEDO)公募事業「産業DXのためのデジタルインフラ整備事業/デジタルライフラインの先行実装に資する基盤に関する研究開発」において、自動運転トラックの安全性と共同輸送を支えるシステム開発を行っている。4社は同事業の結果について、2025年3月5日に記者説明会を開催した。
自動運転トラックは車両価格が高いため、車両の稼働率を引き上げる必要がある。また、自動運転を支援するインフラ等が整備された高速道路1における運行から実現していくと考えられる2。このため、特定の拠点間を高頻度で往復する運行が望ましい。一方で、荷物は最終的にドアツードアで輸送する必要があるため、自動運転トラックが発着する拠点から集荷・配送先までの間は、当面有人運転のトラックで輸送する必要がある。このため、各集荷・配送先から拠点に集まった荷物を拠点で有人運転のトラックから自動運転トラックに中継し、拠点間では共同で自動運転トラックを利用する共同輸送を行うことになる。
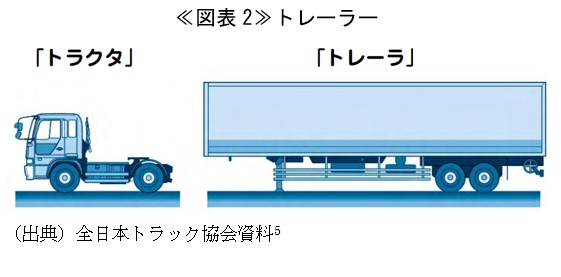
荷物を有人運転のトラックから自動運転トラックに中継する方法としては、荷台を開けて荷物を積み替える、コンテナを活用して載せ替える、スワップボディと呼ばれる荷台の箱だけを切り離せるトラックを活用する≪図表1≫、トレーラーを活用し運転席部分のトラクターだけを付け替える≪図表2≫といった方法が考えられる3。

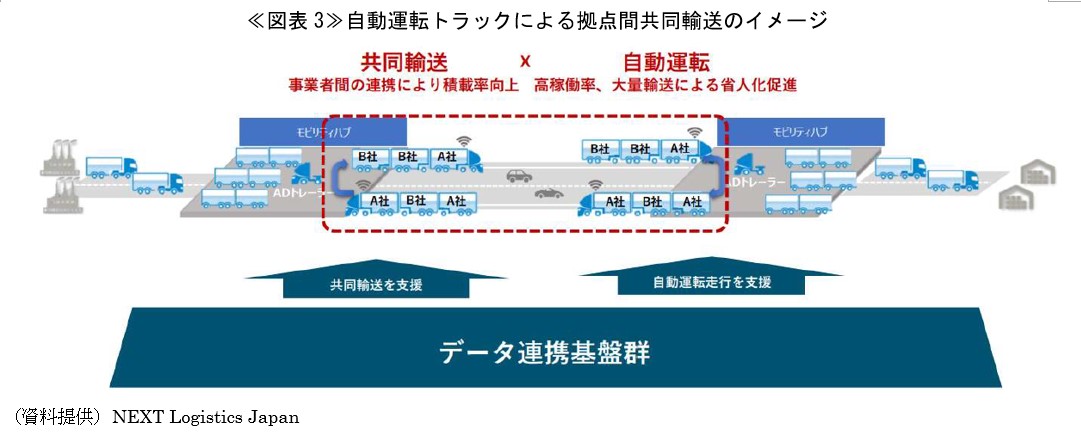
今回の事業では、自動運転トラックをトラクターとして、トレーラーで荷物の受け渡しを行うことを前提に、マッチングプラットフォームの開発、組み合わせや運行計画の最適化及びトレーラーとトラクターの引き渡し情報の高セキュリティ化等のデータ連携基盤開発が行われた≪図表3≫。また、NEXT Logistics Japanの梅村幸生社長は将来の自動運転のイメージとして1台のトラクターに2~3台のトレーラーを連結する、ダブルストレーラー、トリプルストレーラーによる自動運転を実現したいと説明した≪図表4≫。

ただし、こうした長大車両を利用することは現時点では難しい。今回NEXT Logistics Japanがイメージとして展示した車両は全長約30m、車両総重量約58tとなる
日本では一部の高速道路を主に通行する場合に限って全長25m、車両総重量44tまでのダブル連結トラックの走行が許可されている6が、その導入にあたっては走行安定性や周囲の交通に及ぼす影響が検討されている。国土交通省が2016年に行った調査7によると、走行安定性等は問題ないものの、高速道路本線を21m超のダブル連結トラックが2台連続して走行してきた場合、IC等から合流しようとする車両との車間距離が短くなり、急ブレーキの可能性が高まることが分かっている。このため現時点では全長21m超のダブル連結トラックが2台連続で走行することは禁止8されている
さらに、自動運転になると、車両周辺の様子をセンサー等で把握することになるが、全長が長くなれば、トラクターのセンサーだけでは周囲の把握が難しくなると考えられる9。特に分合流や車線変更については、全長12mの一般的な大型トラックを自動運転にする場合でも、周囲の車両の位置や速度等の情報を道路側のセンサーから得ることが必要だと考えられている。国は分合流支援のためのセンサー等を設置した「自動運転サービス支援道路」を整備する方針で、2025年3月3日から新東名高速道路で実証実験が行われている10。
ただし、今後、こうした分合流支援設備や周囲の車両への情報提供が行われる「自動運転サービス支援道路」が広がっていけば、分合流地点における速度調整や車間距離の調整は現状よりしやすくなるだろう。実際の高速道路において走行可能かは交通量やインフラ環境を踏まえた検証が必要だが、分合流支援設備が普及することで、将来、自動運転によるダブルストレーラーやトリプルストレーラーの運行が実現に近づくと考えられる。自動運転のためのインフラが整備されることで、現在の大型トラックが自動運転に置き換えられるだけでなく、ダブルストレーラーやトリプルストレーラーといったさらなる効率化につながることも期待したい。
- 詳しくはSOMPOインスティチュート・プラス(2025年3月4日)「自動運転サービス支援道路の実証実験はじまる~自動運転トラック実現には検証と整備のスピードアップを~」
- SOMPOインスティチュート・プラス(2023年9月29日)「モーダルシフトに見る自動運転トラックの展望と課題~物流の 2024 年問題とモード間接続の重要性~」p.15,19
- SOMPOインスティチュート・プラス(2023年9月29日)「モーダルシフトに見る自動運転トラックの展望と課題~物流の 2024 年問題とモード間接続の重要性~」pp.19-20
- 日本トレクス「製品紹介」https://www.trex.co.jp/products/track-body/ (最終閲覧日:2025年3月7日)
- 全日本トラック協会(2007年12月)「トラックドライバーのためのトレーラの安全運行のポイント」p.2
- 詳しくはSOMPOインスティチュート・プラス(2022年11月15日)「ダブル連結トラックの課題と普及に向けて」及びSOMPOインスティチュート・プラス(2024年9月19日)「拡大するダブル連結トラックの運行~休憩施設の整備が鍵、複数縦列式駐車マスに期待~」を参照
- 国土交通省(2018年11月30日)「社会資本整備審議会 道路分科会 基本政策部会 第17回物流小委員会 資料1-2 ダブル連結トラックについて」
- 国土交通省「長さ21mを超えるフルトレーラ連結車の緩和要件等」
- オーストラリアではトリプルストレーラーの自動運転が行われているが、柵とセンサーが設置された専用道路を通行しており、一般車両との混在は避けられている。(https://www.mineralresources.com.au/our-business/onslow-iron-project/autonomous-road-trains/ (最終閲覧日:2025年3月10日))
- 詳しくはSOMPOインスティチュート・プラス(2025年3月4日)「自動運転サービス支援道路の実証実験はじまる~自動運転トラック実現には検証と整備のスピードアップを~」